What’s included

- TRLC-DK1 Follower Arm
- USB-C to CAN Adapter Cable (incl. XT-30 24V Power)
- Hot-swappable Soft Fingers
- UART (3-pin) Motor Debugging Cable
- USB-C Cable (2m)
- TRLC-DK1 Leader Arm
- Part Variant: Mount for 3/8“ Stands
- Part Variant: Flipped Wrist
- USB-C Cable (2m)
- Power Supply
- Follower Power Cable (2m, XT30, 24V)
- Leader Power Cable (2m, 5.5mm x 2.1mm DC, 5V)
- Context Camera (UVC, Fish-eye Lens)
- USB Cable (3m)
- USB-C Hub (4 Ports)
- E-Stop for Follower Power
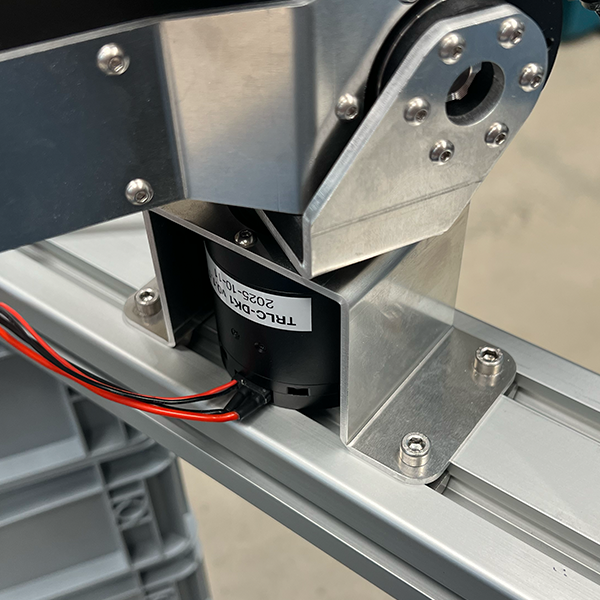
Mounting
You have two options of mounting the arm; (1) with clamps or (2) 4080 aluminium extrusions: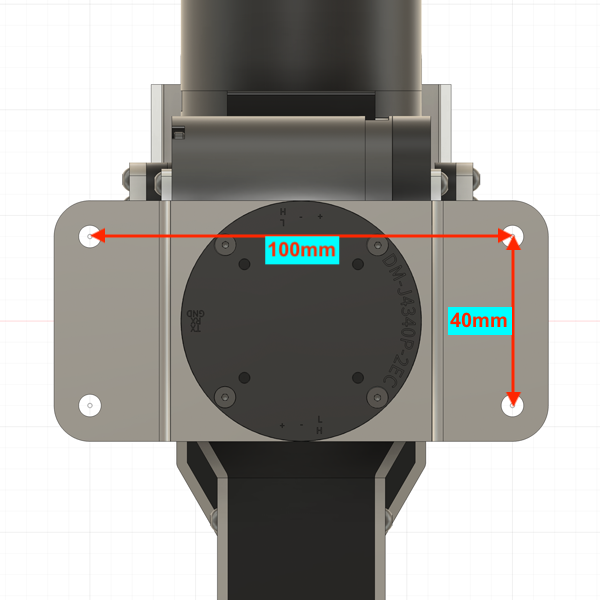

Wiring
Power Connections: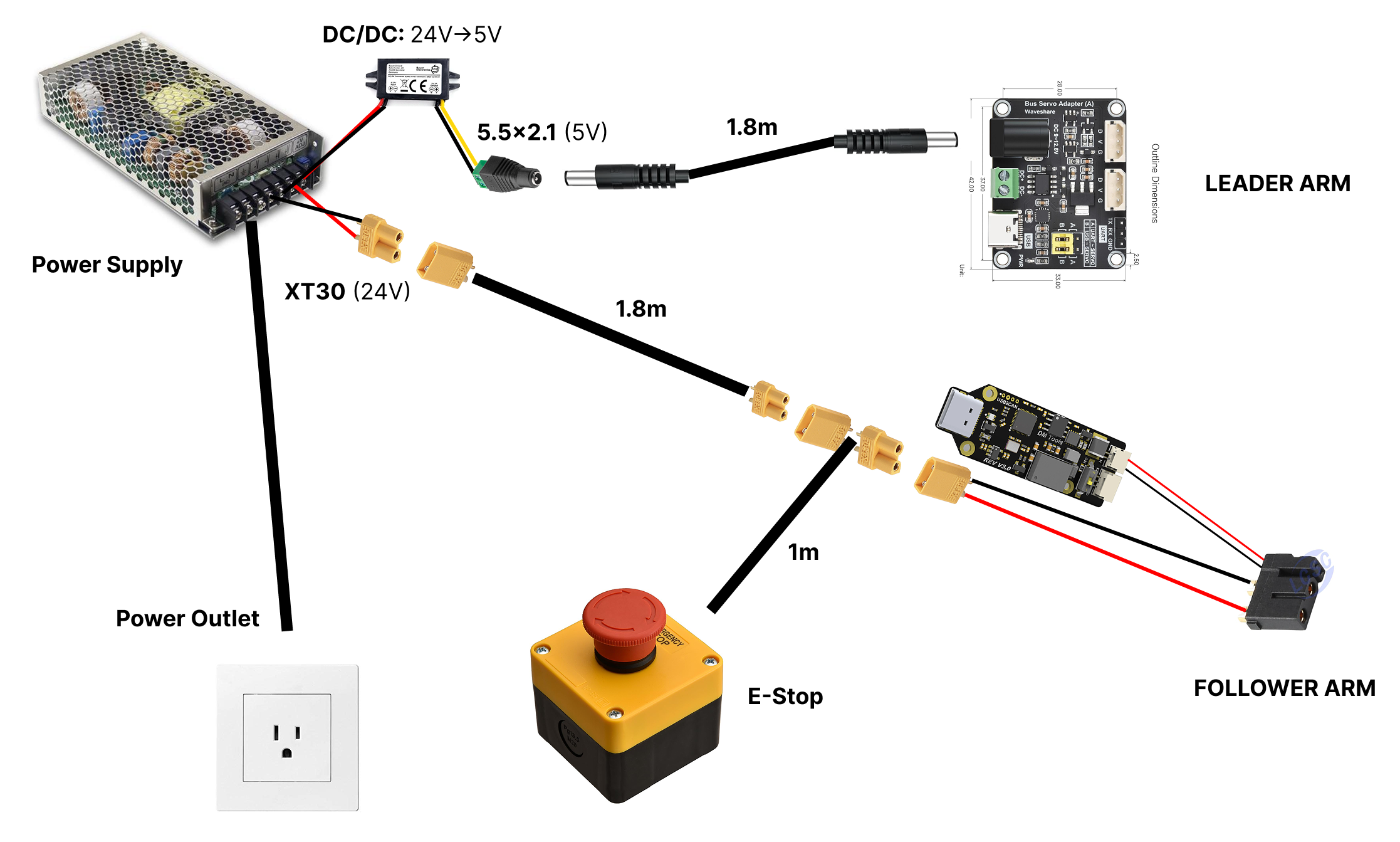
Teleoperation
Install trlc-dk1 from the GitHub repository. Use LeRobot’s CLI to identify your leader and follower ports:examles/teleop.py or examples/bi_teleop.py.
The DK1FollowerConfig class has a parameter called joint_velocity_scaling:
1.0 is maximum motor speed.